Особенности продукта:
Мраморное основание сочетается с линейными направляющими высокой жесткости и высокоточной оптической решетчатой обратной связью, что может обеспечить стабильную точность продукта в течение длительного времени.
Ось X, ось Y, ось C, ось B, ось A приводятся в действие двигателем с прямым приводом, который может обеспечить высокое ускорение и субмикронную точность. Ось X, ось Y приводилась в движение линейным двигателем, который встроен в двумерную поперечную структуру. Прямой привод оси C, оси B, оси A от DDR, который встроен в конструкцию поворотной головки. Ось Z1, ось Z2 приводилась в движение серводвигателем с тормозом и защитой от отключения питания.
Максимальная скорость оси X, оси Y составляет 1 м/с, ускорение составляет 1G, а точность повторного позиционирования составляет ± 1 мкм.
Точность повторного позиционирования оси вращения ±1,5 угловой секунды.

Параметр:
| Элемент |
ось X |
ось Y |
ось Z1 |
ось Z2 |
ось C |
ось B |
ось А |
| Ход (мм) |
500 |
300 |
300 |
150 |
100°-+40° |
100°-+40° |
360° |
| Макс.скорость (мм/с) |
1000 |
1000 |
500 |
500 |
500 об/мин |
300 об/мин |
500 об/мин |
| Точность повторения (мкм) |
±1 |
±1 |
±0,01 |
±0,01 |
±1,5 угл. с |
±1,5 угл. с |
±1,5 угл. с |
| Ускорение (g) |
0,5 |
0,5 г |
0,5 |
0,5 |
|
|
|
| Нагрузка (кг) |
|
|
30 |
30 |
|
|
|
| Точность позиционирования по оси Z1 и оси Z2≤0,01 мм; Перпендикулярность оси XY≤0,01 мм; Плоская перпендикулярность оси Z1 и XY≤0,01 мм |
|||||||
| Любое положение в пространстве и теоретическое отклонение ≤0,04 мм |
|||||||
Приложение:
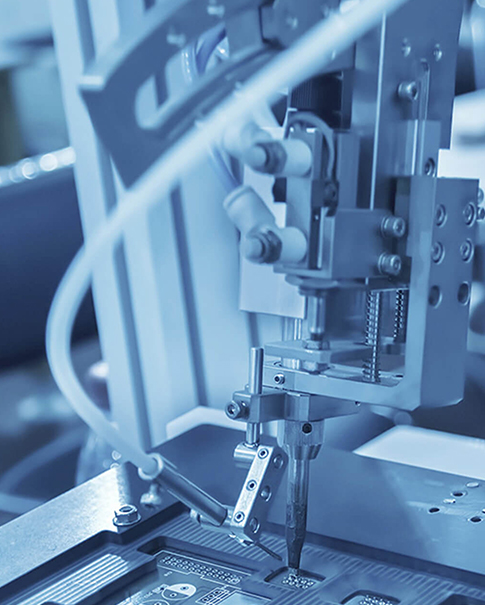
Шестиосевой моторизованный линейный столик обеспечивает высокую скорость, ускорение и точность.
Требования к настройке продукта. Он подходит для контроля стеклянных чешуек, резки стекла, лазерной обработки (фасонная маркировка), контроля пластин, формирования изображений с помощью ПЗС, трехмерного сканирования профиля и других высокотехнологичных производственных отраслей.
Сценарии применения:
Он может реализовать быструю и точную работу «точка-точка» в шестимерном диапазоне твердого пространства.
Его можно сочетать с камерами линейного сканирования, лазерами для съемки в воздухе, маркировки в воздухе и других действий по обработке.
Используйте режим высокоскоростного линейного этапа с шестиосевой связью для реализации интерполяционного движения любой кривой в пределах диапазона хода.
Аппаратная конфигурация:
Ось X/Y — высокоточный линейный столик (с обратной связью по оптической решетке + линейный привод)
Ось A / B / C — каскад двигателя постоянного тока DDR (с оптической решеткой обратной связи + драйвер DDR)
Ось Z1/Z2 — сервомодуль (серводвигатель + сервопривод + полностью замкнутый контур управления)
Многоосевой контроллер движения: (включая импульсный выход по восьми осям + аналоговый выход по восьми осям)
Датчик предела и начала: оснащен датчиком предела и начала решетки, а также фотоэлектрическим датчиком в резерве.
Визуальная система с различными сценариями применения (опционально)

Конфигурация программного обеспечения:
Прецизионные моторизованные линейные столики оснащены программным обеспечением и инструкциями для отладки привода и контроллера каждой оси, различными интерфейсами движения траектории интерполяции, а также обеспечивают компенсацию позиционирования, визуальную калибровку, точное измерение, обеспечивают раннее обучение руководству и помощь в разработке, а также предоставляют услуги по разработке программного обеспечения.
Компенсация точности моторизованных ступеней позиционирования:
Линейная ошибка оси движения
Ошибка вертикальности оси движения
Ошибка сборки оси вращения в центре вращения



















